小孔相机模型
https://blog.csdn.net/lsh_2013/article/details/47615309
坐标系及其转换
相机模型中有四个重要的坐标系
- 1.世界坐标系 ($X_w, Y_w, Z_w$),世界坐标系就是物体在真实世界中的坐标
- 2.像平面坐标系($x, y$),注意这个是像平面的物理坐标,单位是实际物理长度,如1cm等
- 3.像素坐标系($u, v$),注意这个是像平面的像素坐标,是按个算的像素位置,如(3, 5)是指第三行第五个像素。
- 4.相机坐标系($X_c, Y_c, Z_c$), 是以相机为中心,相机朝向为坐标轴方向的坐标系,实际上就是世界坐标系进行了一定的线性变换得到的新的坐标系。(显然从世界坐标系转换到相机坐标系物体都是保持线性关系的,不会发生扭曲,相对位移等,因此这就是个仿射变换)
相机坐标系和世界坐标系的变换
既然知道了这就是个仿射变换,那么其实转换形式也就定下来了。实际上就是一个三维旋转平移矩阵. 点击这里复习三维坐标系旋转平移的各种表示方法: https://zhuanlan.zhihu.com/p/45404840
三维的旋转矩阵就是一个3x3的矩阵,是由三个旋转矩阵按照欧拉角的顺规顺序点乘得来的,维基百科有所有12种顺规的旋转矩阵表示:https://en.wikipedia.org/wiki/Euler_angles
显然,旋转矩阵,加上平移分量,就可以用齐次坐标表示相机坐标系和世界坐标系的转换了。
反正得到的旋转矩阵是这样的形式:
像素坐标系与像平面坐标系转换
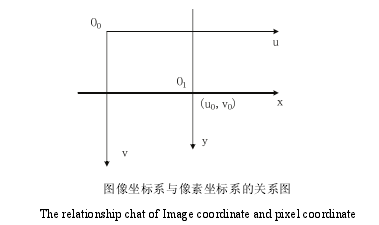
可以看到,像素坐标系和像平面坐标系还是比较容易转换的,其中一个关键参数就是一个像素的物理大小是多少,假设一个像素的物理大小是$(dx, dy)$,那么单位面积的像素个数就是$(\frac{1}{dx}, \frac{1}{dy})$转换关系就是:
相机坐标系与像平面坐标系关系
也就是成像关系,符合相似三角形性质
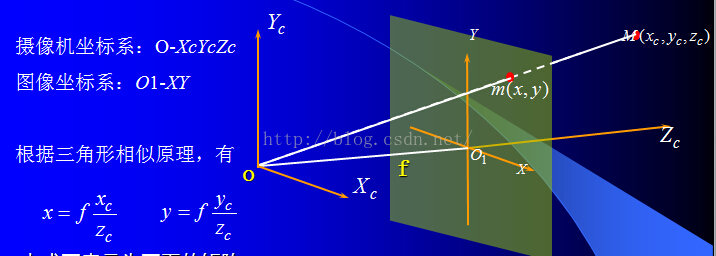
我们可以看到
综合上述三个转换关系,我们能够得到从世界坐标到像素坐标的转换关系
其中:
所以
注意,我们看到,这些矩阵计算过程中,是需要保留中间结果$Z_C$的,不能直接混在一起乘过去。实际上,K是OpenGL根据glViewPort计算出来的,用来决定OpenGL的像平面(三维空间里的二维平面, 范围是x, y都是[-1, 1])和实际渲染的像素(实际渲染结果)的比例,因此在GLSL里面我们完全可以将所有矩阵都乘完,此时所有的矩阵等效于一个$M$,此后我们就管不着了,到了OpenGL内部去了,此时OpenGL会自动除以第三个参数,也就是$Z_C$,将[-1, 1]范围内的留下,然后再乘以K。比如一个常见的片段着色器可以这么写:
1 | #version 330 core |
实际上,到gl_Position为止,依然还是相机坐标,还没渲染到像平面(即还没除以$Z_C$),也显然没到像素(即还没乘以K)。而OpenGL的相机内参K非常简单,那就是:一般而言,f/dx = 渲染宽度,可以取img.cols/2, f/dy是渲染高度,可以取img.rows/2 ,也就是,像平面坐标(1, 1)映射到图像像素那就是(x=cols/2, y=rows/2),以图像中心为坐标原点,刚好是右上角,所以不要觉得神奇,就是个约定。
OpenGL这个相机是假的,所以K是已知的,但是实际的相机K可不是这么简单的。K的参数完全由相机决定,称之为内部参数矩阵,而M的参数则由相机的位置所决定,称之为外部参数矩阵。实际成像模型,考虑到相机镜头加工不完善,还会存在畸变,比如由于多个光学镜头的主光轴不完全共线产生的径向和切向畸变。参考:https://blog.csdn.net/dcrmg/article/details/52950141
切向畸变是由于透镜本身与相机传感器平面(成像平面)或图像平面不平行而产生的,这种情况多是由于透镜被粘贴到镜头模组上的安装偏差导致。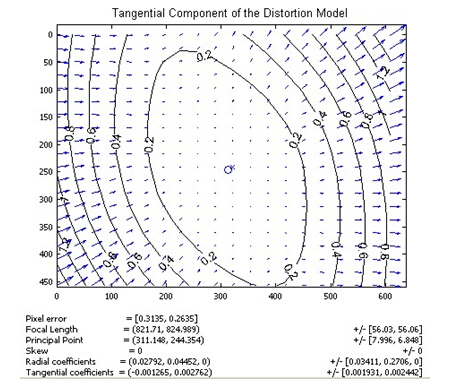
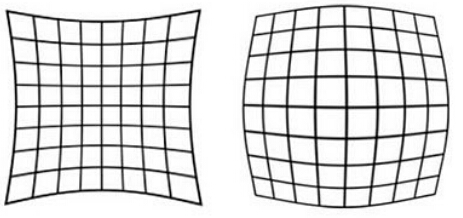
径向畸变就是沿着透镜半径方向分布的畸变,产生原因是光线在原理透镜中心的地方比靠近中心的地方更加弯曲,这种畸变在普通廉价的镜头中表现更加明显,径向畸变主要包括桶形畸变和枕形畸变两种。以下分别是枕形和桶形畸变示意图: